联系电话:020-88888888
联系电话:020-88888888
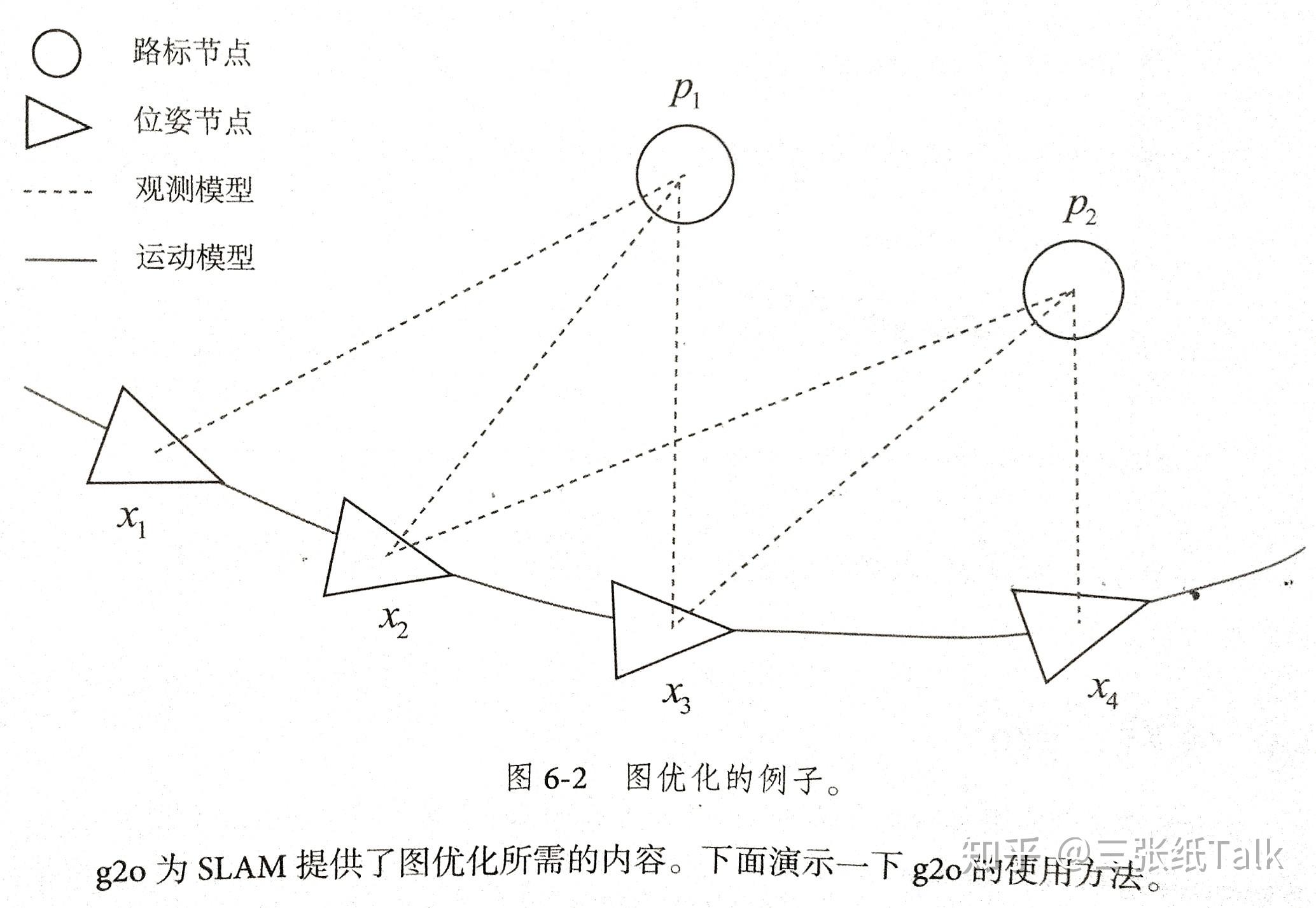
图优化,是把优化问题用图(Graph)描述:一个图由若干个顶点(Vertex),以及连接着这些顶点的边(Edge)组成。顶点表示优化变量,边表示误差项。
1)三角形表示相机位姿节点,即帧(Frame、KeyFrame)的相机位姿
2)圆形表示路标点:p1和p2,即地图点,3D点,构成了图优化的顶点
3)实线表示相机的运动模型:相机的运动轨迹
4)虚线表示观测模型:p1的观察帧是x1、x2、x3,虚线构成了图优化的边
从上述的简介可以看出:构成图优化需要边和顶点,顶点也是边的构成部分。下图是优化p1和p2等3D地图点。
Optimizer类中的5种优化模型都是基于下图演变而来。
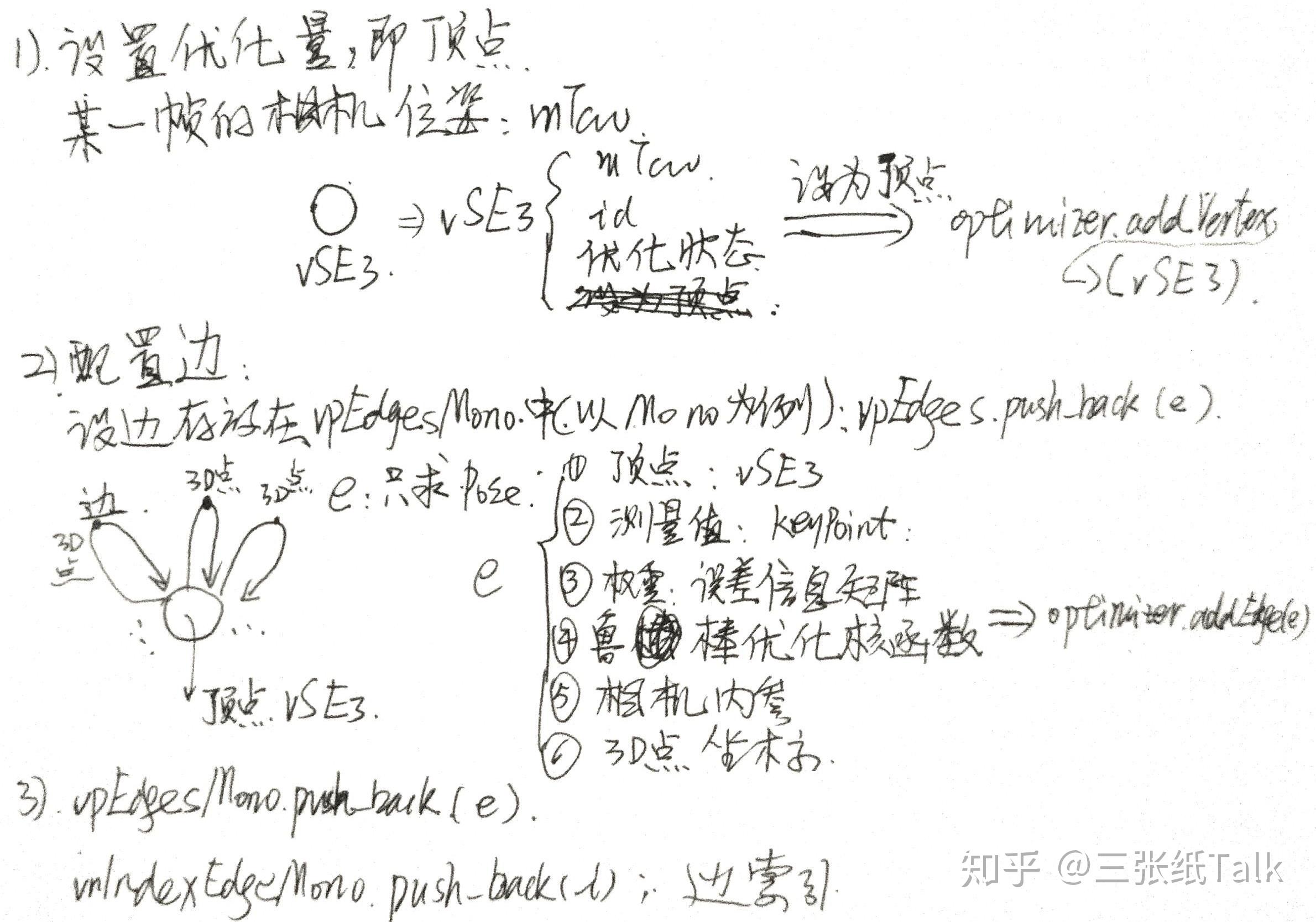
1.帧的相机位姿优化函数PoseOptimization
PoseOptimization优化的是单帧图像的位姿。相机在运动过程中,每帧图像都含2D特征点和与其对的3D地图点,通过3D-2D的投影关系估计出相机的位姿。
PoseOptimization是对某帧图像中的多个地图点建立多个一元连接边,构成图进行优化,优化某帧图像对应的相机的位姿。
2. 通过两帧之间匹配的MapPoints优化两帧间Sim3:OptimizeSim3
OptimizeSim3优化两帧的Sim3
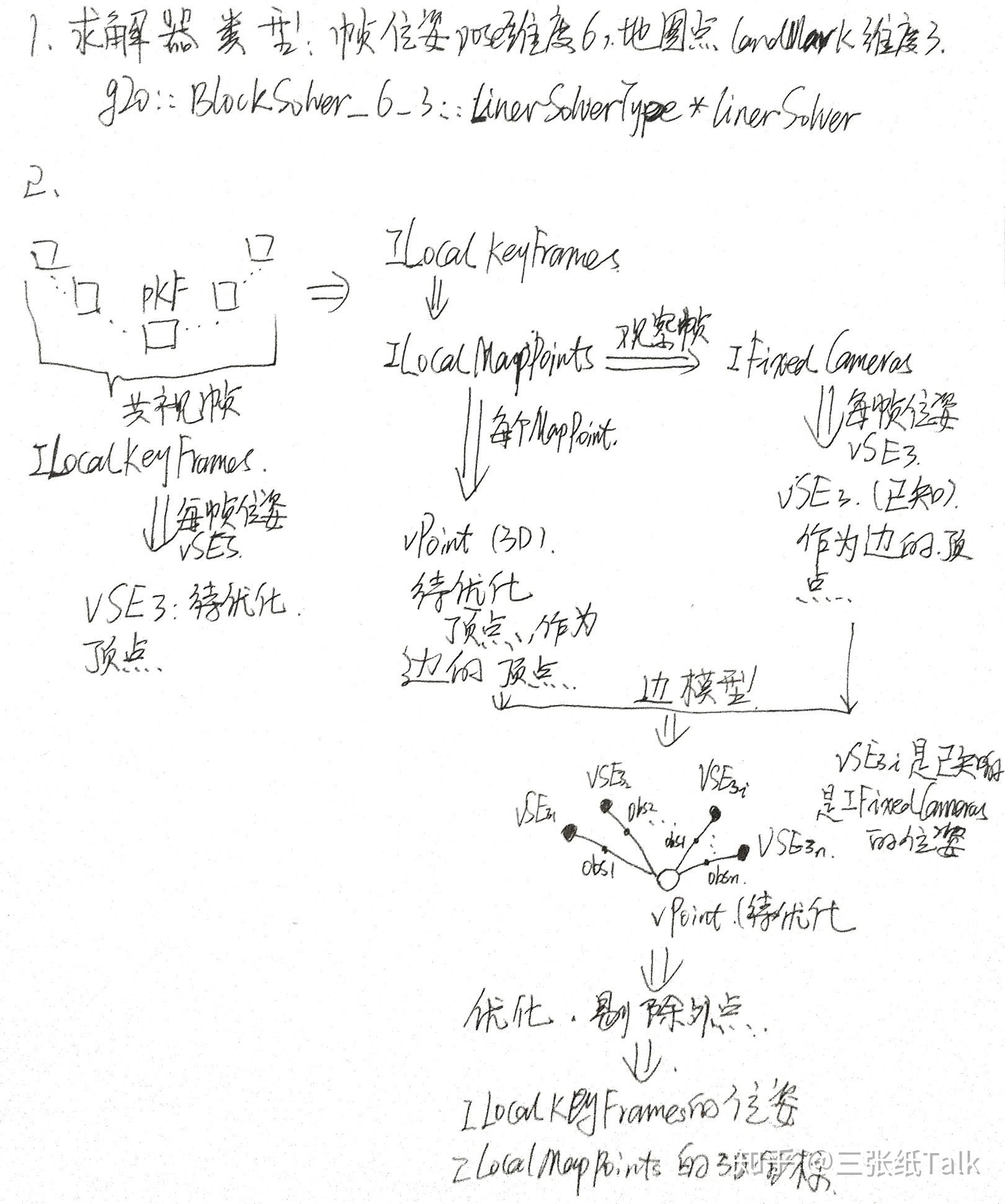
3.局部BA优化LocalBundleAdjustment
4.本质图优化OptimizeEssentialGraph
5.全局BA优化GlobalBundleAdjustment
PoseOptimization是针对某一帧图像的相机位姿的。该帧已知的条件有3D地图点坐标,2D特征点坐标和相机内参等,构建的图优化模型:相机位姿是待优化量作为图优化的顶点,3D地图点、相机内参、相机位姿(待优化)构成图优化的边。
模型很像14讲的“6.4.3 使用g2o拟合曲线”的示例中的图优化模型。
PoseOptimization函数的步骤:
4. 进行4次优化,每次迭代10次,剔除外点和误差过大的边
//初始值
vSE3->setEstimate(Converter::toSE3Quat(pFrame->mTcw));
optimizer.initializeOptimization(0);//对level为0的边进行优化
optimizer.optimize(its[it]);其实在optimizer.optimize(its[it]);中调用了函数:
//来自types_six_dof_expmap.h的计算误差函数
void computeError(){
const VertexSE3Expmap* v1=static_cast<const VertexSE3Expmap*>(_vertices[0]);
Vector2d obs(_measurement);
_error=obs - cam_project(v1->estimate().map(Xw));
}计算卡方:在base_edge.h中,使用卡方校验剔除外点
virtual double chi2() const
{
return _error.dot(information()*_error);
}for (size_t i=0, iend=vpEdgesMono.size(); i < iend; i++)//单目 每条边
{
g2o::EdgeSE3ProjectXYZOnlyPose* e=vpEdgesMono[i];
const size_t idx=vnIndexEdgeMono[i];
if (pFrame->mvbOutlier[idx])//外点
{
e->computeError();
}
const float chi2=e->chi2();
if (chi2 > chi2Mono[it])
{
pFrame->mvbOutlier[idx]=true;//是外点 不好的点
e->setLevel(1);// 设置为outlier
nBad++;
}
else
{
pFrame->mvbOutlier[idx]=false;//原来是外点 优化过后 误差变小 变成内点了
e->setLevel(0);// 设置为inlier
}
if (it==2)
e->setRobustKernel(0);// 除了前两次优化需要RobustKernel以外, 其余的优化都不需要
}5. 更新优化后的Frame的相机位姿
ORB-SLAM当中在LoopClosing::ComputetSim3()中调用了OptimizeSim3函数。
单目相机具有尺度不确定性,相机运动一段时间后可能会产生尺度漂移和误差,通过计算两帧图像的Sim3变换,获取尺度变换。并通过Sim3匹配两帧图像,获取更多匹配的MapPoints,因为产生了新的匹配的MapPoints,在使用这些MapPoints对Sim3进行优化,获取精度更高的Sim3。
Sim3Solver类的讲解见下面的链接:
三张纸Talk:[ORBSLAM2_14]之Sim3Solver边主要由3D点(已知)、2D点(已知)、待求值g2oS12组成。
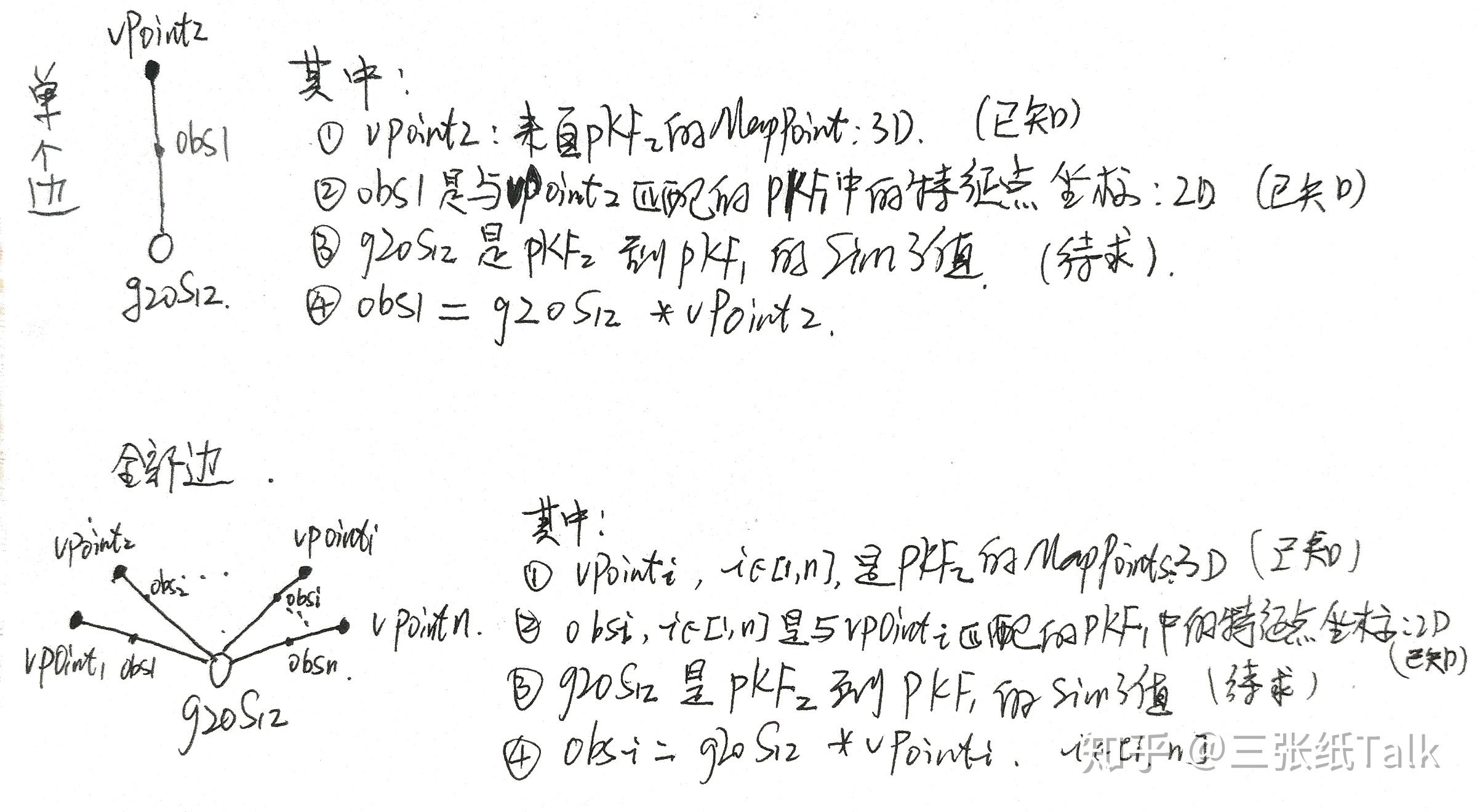
1)构造并初始化优化器:g2o::SparseOptimizer optimizer
2)将两帧之间的Sim3(待求量)设置为顶点:optimizer.addVertex(vSim3);
3)将两针之间匹配上的地图点(世界坐标系)分别转为在各自相机坐标系下的坐标(3D)设置为顶点(已知):optimizer.addVertex(vPoint1);和optimizer.addVertex(vPoint2);
4)分别设置两帧对应的地图点(相机坐标系下的坐标)vPoint1和vPoint2的重投影误差(封装在SparseOptimizer::computeActiveErrors())为边
5)进行优化:optimizer.optimize(5);
6)剔除重投影误差过大的边:卡方校验if (e12->chi2() > th2 || e21->chi2() > th2)
7)再进行一次优化,剔除外点
8)更新优化后的sim3:g2oS12
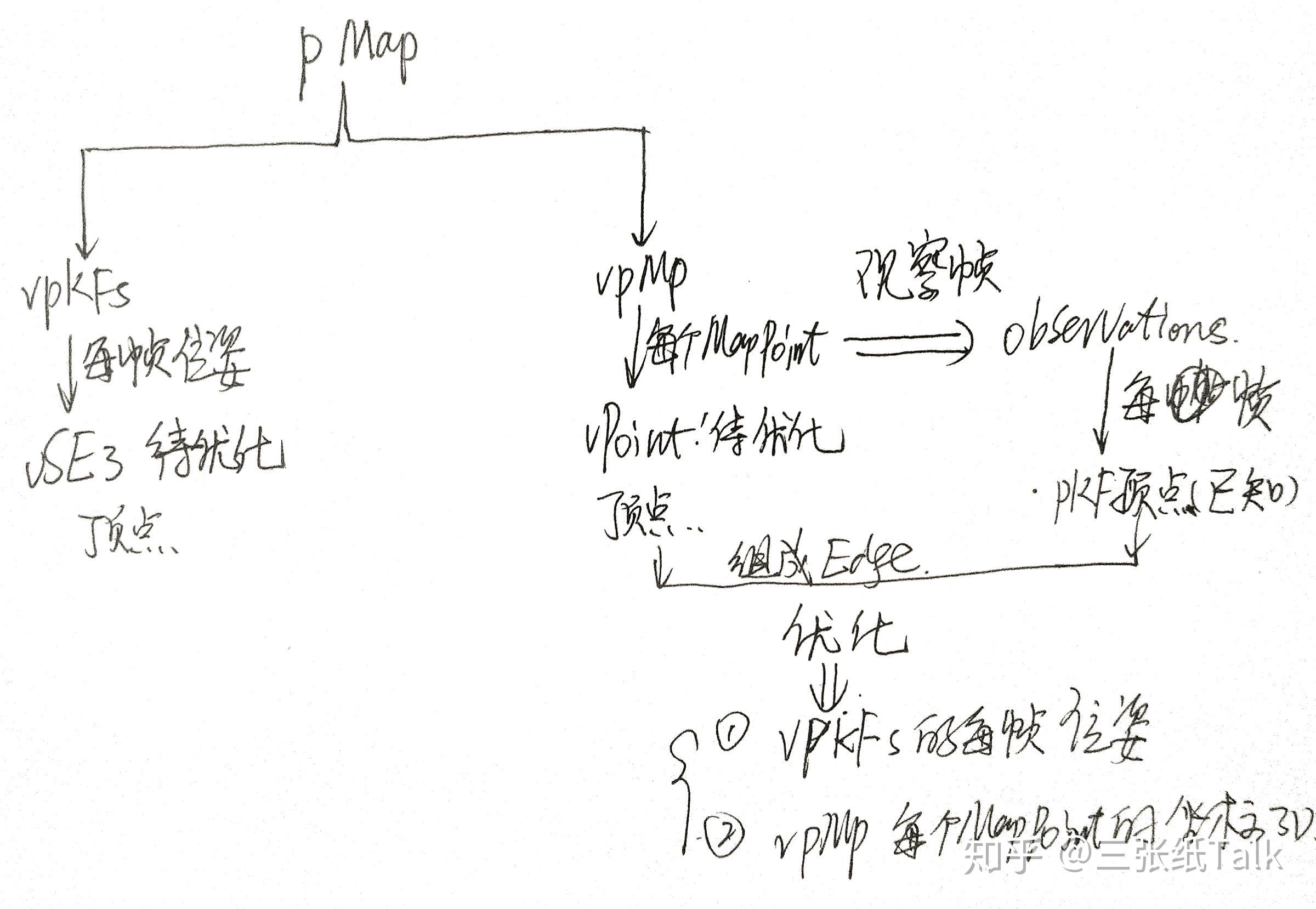
局部BA优化,优化的是局部关键帧的位姿(待优化)和这些局部关键帧可以观测到的地图点的3D坐标(待优化)。局部关键帧是当前关键帧的共视帧集合,局部地图点是局部关键帧的所有地图点集合。将局部地图点与可以观测到他们的关键帧放在一起进行优化,将可以观察到局部地图点的关键帧的SE3位姿和局部地图点的3D坐标(待优化量)添加到顶点中,并作为边的顶点进行优化。
void Optimizer::OptimizeEssentialGraph(Map* pMap, KeyFrame* pLoopKF, KeyFrame* pCurKF, const LoopClosing::KeyFrameAndPose& NonCorrectedSim3, const LoopClosing::KeyFrameAndPose& CorrectedSim3, const map<KeyFrame*, set<KeyFrame*> >& LoopConnections, const bool& bFixScale)
优化pMap中的每一个关键帧pKF的位姿和每一个地图点的坐标。
本质图EssentialGraph包含了四部分:LoopConnections、父关键帧(Spanning tree edge)、pKF->GetLoopEdges()、pKF->GetCovisiblesByWeight(minFeat)放在一起进行优化,优化的目标是关键帧pKF的sim3位姿和地图点的坐标。 将优化后的sim3位姿转换为SE3,就得到了相机的位姿,并对地图点的坐标进行投影得到更新后的坐标。
Sim3Solver类的讲解见下面的链接:
三张纸Talk:[ORBSLAM2_14]之Sim3Solver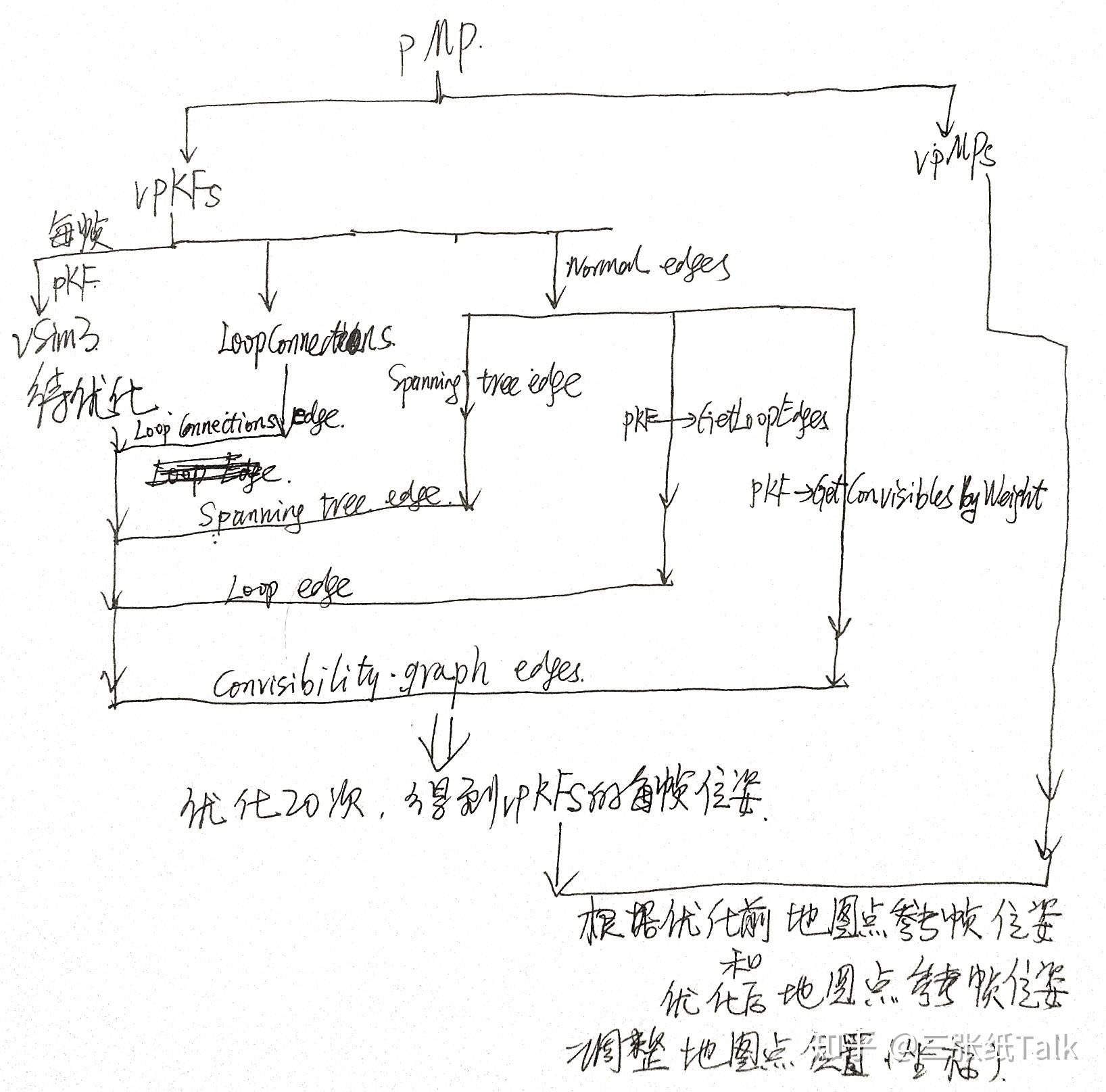
整个地图中所有关键帧和所有地图点都优化,将全局地图当中所有的关键帧和地图点都放进来一起进行优化。对关键帧的位姿和地图点3D坐标进行优化。

某某自来水业务系统,是一套适合各种规模自来水公司的网络版自来水多种类业务管理软件。根据各大自来水公司存在的问题和需求自主...

某某自来水业务系统,是一套适合各种规模自来水公司的网络版自来水多种类业务管理软件。根据各大自来水公司存在的问题和需求自主...

某某自来水业务系统,是一套适合各种规模自来水公司的网络版自来水多种类业务管理软件。根据各大自来水公司存在的问题和需求自主...

某某自来水业务系统,是一套适合各种规模自来水公司的网络版自来水多种类业务管理软件。根据各大自来水公司存在的问题和需求自主...
 QQ:88888888
QQ:88888888 13899999999
13899999999

 返回顶部
返回顶部
